
Lin Feng, Ph.D.
Associate professor, Bei hang University
linfeng@buaa.edu.cn
Biography:
Lin Feng, Bei hang University, associate professor, doctoral tutor. He received the Master of Eng. degree from the Tohoku Univ. Japan in 2011. He received Dr. of Eng. from Nagoya University in 2014. Since 2014, he was research fellow of Department of Micro System Eng., Nagoya University and hired by JSPS by Japanese government. Since 2015, he is researcher of Department of Intelligent Transportation System (ITS) in Nissan Motor, Japan. He is mainly engaging in the research fields of micro/nano robotics, and its application to the cell manipulation, bio-automation systems, medical robotic systems, target drug delivery system by using micro/nano robot, intelligent robotic systems. Professor Feng's Bionic and Micro-Nano System Laboratory participated in a number of major research projects and won several awards at the IEEE International Robotics Society. He has published more than 70 papers in the field of robotics and micro-nano systems. In February 2016, he published innovative research results in the International Journal of Robotics Research, the highest-level journal in the field of robotics.
Topic title:The application of micro/nano-robot in biomedical field
Abstract:Cancer is a major problem that has not yet been overcome in the history of human diseases. According to statistics, the number of cancer patients in China has exceeded 10 million, and the number of new patients has increased to nearly 4 million per year. As a means of systemic therapy, chemotherapy has the disadvantages of poor drug targeting and large side effects. In recent years, targeted drug technology has made great progress, but the lack of universality, passive targeting and low efficiency have limited the further development of precision treatment.
The rapid development of micro-nano technology and materials science provides new solutions for precise treatment. As a drug carrier, micro-nano robots controlled by precious magnetic field are expected to achieve drug delivery and cell grasping in vitro. In the fields of cell biology and regenerative medicine, the precise operation of cell-level organization is extremely important.
Magnetic control system for micromanipulation has become the first choice for in vivo navigation and micromanipulation due to its large working space, large operating force, little influence on biological tissue, and no need for external energy input lines and control lines. Fig. 1 is an in vitro experimental diagram of tumor therapy using a magnetic system to operate a "cell robot".
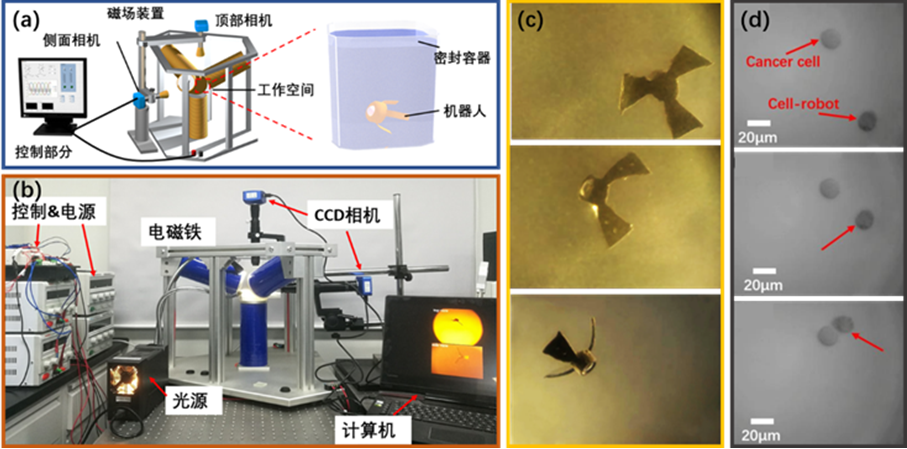
Fig.1 bionic microrobot and magnetic control system
The permanent magnetic tools for cell manipulation has been widely used in the fields of cell cloning and single cell analysis. The use of permanent magnet tools will enable high-throughput, fully automated operation of cells. As shown in Fig. 2.

Fig.2 permanent magnetic microtool robot and control system
The photoelectric iridium system for micromanipulation has submicron control accuracy and the possibility of controlling the target group, as shown in Fig. 3(a), which is the working principle of the spot diaphragm. Optoelectronic Tweezers (OET) is a new manipulation technology that combines aperture and dielectrophoresis to produce dynamic optical virtual electrodes for more complex manipulation of particles.
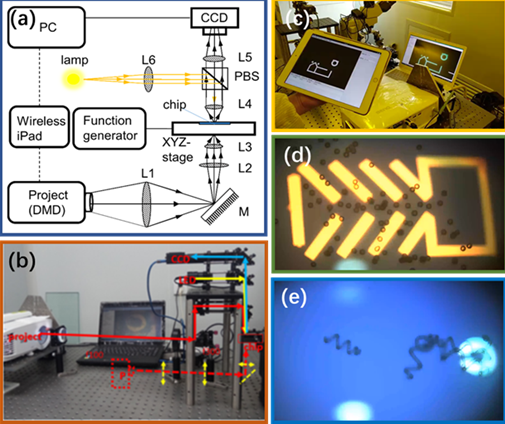
Fig. 3 operating system of optoelectronic tweezers
The sound wave drive operating system has the characteristics of large output force, no damage to biological tissues, and simple system. By changing the shape of the structure to produce different types of micro-acoustic flow, cell-level precision operations such as cell capture, cell handling, and cell rotation can be achieved.
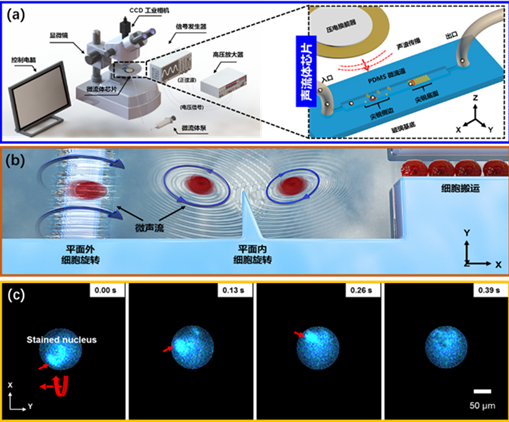
Fig. 4 Acoustic-driven operating system
Recently, the development of micro-nano robot technology is increasingly showing the trend of precision, intelligence and multi-function. With the goal of establishing micro-nano-scale real-time positioning tracking and precise control, our laboratory is dedicated to the research of robots and their systems, and explores new control methods based on ultrasonic-magnetic field recombination, scanning photoelectric iridium, magnetic field-fluid coupling, etc.
[1]. Feng, L., Di, P., Arai, F. High-precision motion of magnetic microrobot with ultrasonic levitation for 3-D rotation of single oocyte,(2016) International Journal of Robotics Research, 35 (12), pp. 1445-1458.
[2]. Feng, L., Song, B., Chen, Y., Liang, S., Dai, Y., Zhou, Q., Chen, D., Bai, X., Feng, Y., Jiang, Y., Zhang, D., Arai, F. On-chip rotational manipulation of microbeads and oocytes using acoustic microstreaming generated by oscillating asymmetrical microstructures(2019) Biomicrofluidics, 13 (6).
[3]. Feng, L., Liang, S., Zhou, X., Yang, J., Jiang, Y., Zhang, D., Arai, F. On-chip microfluid induced by oscillation of microrobot for noncontact cell transportation,(2017) Applied Physics Letters, 111 (20).